
Optimization of stepper motor control in various operating modes
Item ID: 18321
1 Media file
2025/12/04
Citation
eNUPPIR (). Optimization of stepper motor control in various operating modes. https://os4.nupp.edu.ua/item/18321
eNUPPIR. "Optimization of stepper motor control in various operating modes." Web. . <https://os4.nupp.edu.ua/item/18321>.
eNUPPIR. "Optimization of stepper motor control in various operating modes." Accessed . https://os4.nupp.edu.ua/item/18321.
Copied to clipboard
Лактіонов_Янко_57-63
Властивості
Тип
Українська
Назва
Англійська
Optimization of stepper motor control in various operating modes
Українська
Оптимізація керування кроковим двигуном у різних режимах роботи
Автор
Українська
Українська
Опис
Англійська
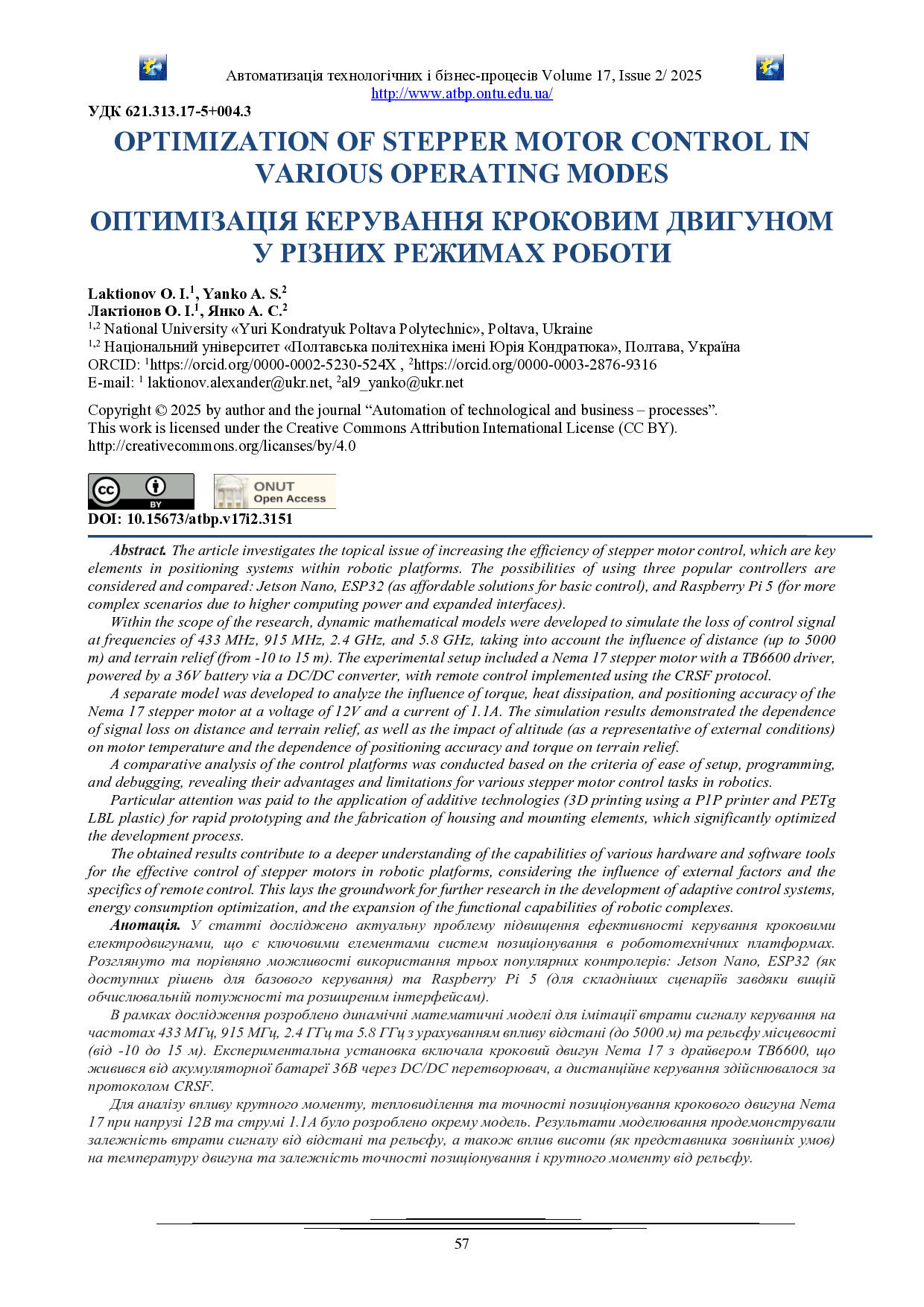
The article investigates the topical issue of increasing the efficiency of stepper motor control, which are keyelements in positioning systems within robotic platforms. The possibilities of using three popular controllers areconsidered and compared: Jetson Nano, ESP32 (as affordable solutions for basic control), and Raspberry Pi 5 (for morecomplex scenarios due to higher computing power and expanded interfaces).Within the scope of the research, dynamic mathematical models were developed to simulate the loss of control signalat frequencies of 433 MHz, 915 MHz, 2.4 GHz, and 5.8 GHz, taking into account the influence of distance (up to 5000m) and terrain relief (from -10 to 15 m). The experimental setup included a Nema 17 stepper motor with a TB6600 driver,powered by a 36V battery via a DC/DC converter, with remote control implemented using the CRSF protocol.
Українська
У статті досліджено актуальну проблему підвищення ефективності керування кроковимиелектродвигунами, що є ключовими елементами систем позиціонування в робототехнічних платформах.Розглянуто та порівняно можливості використання трьох популярних контролерів: Jetson Nano, ESP32 (якдоступних рішень для базового керування) та Raspberry Pi 5 (для складніших сценаріїв завдяки вищійобчислювальній потужності та розширеним інтерфейсам).В рамках дослідження розроблено динамічні математичні моделі для імітації втрати сигналу керування начастотах 433 МГц, 915 МГц, 2.4 ГГц та 5.8 ГГц з урахуванням впливу відстані (до 5000 м) та рельєфу місцевості(від -10 до 15 м). Експериментальна установка включала кроковий двигун Nema 17 з драйвером ТВ6600, щоживився від акумуляторної батареї 36В через DC/DC перетворювач, а дистанційне керування здійснювалося запротоколом CRSF.
Мова
Дата випуску
Тематика
Англійська
Англійська
Англійська
Англійська
Українська
Українська
Українська
Українська
Українська
Українська
Українська
Англійська
Англійська
Англійська
Англійська
Англійська
Англійська
Видавництво
Бібліографічний опис
Українська
Laktionov O.I. Optimization of stepper motor control in various operating modes / O.I. Laktionov, A.S.Yanko // Автоматизація технологічних і бізнес-процесів. – 2025. – Vol. 17, Iss. 2. – P. 57-63. – DOI https://doi.org/10.15673/atbp.v17i2.3151
УДК
621.313.17-5+004.3
Набори елементів 1
Медіа
Metadata Information
Створено
2025-12-4 11:22
Last Modified
2025-12-4 11:22
Date Issued (DC)
2025-07-21
Item ID
#18321
Resource Template
Наукова стаття